
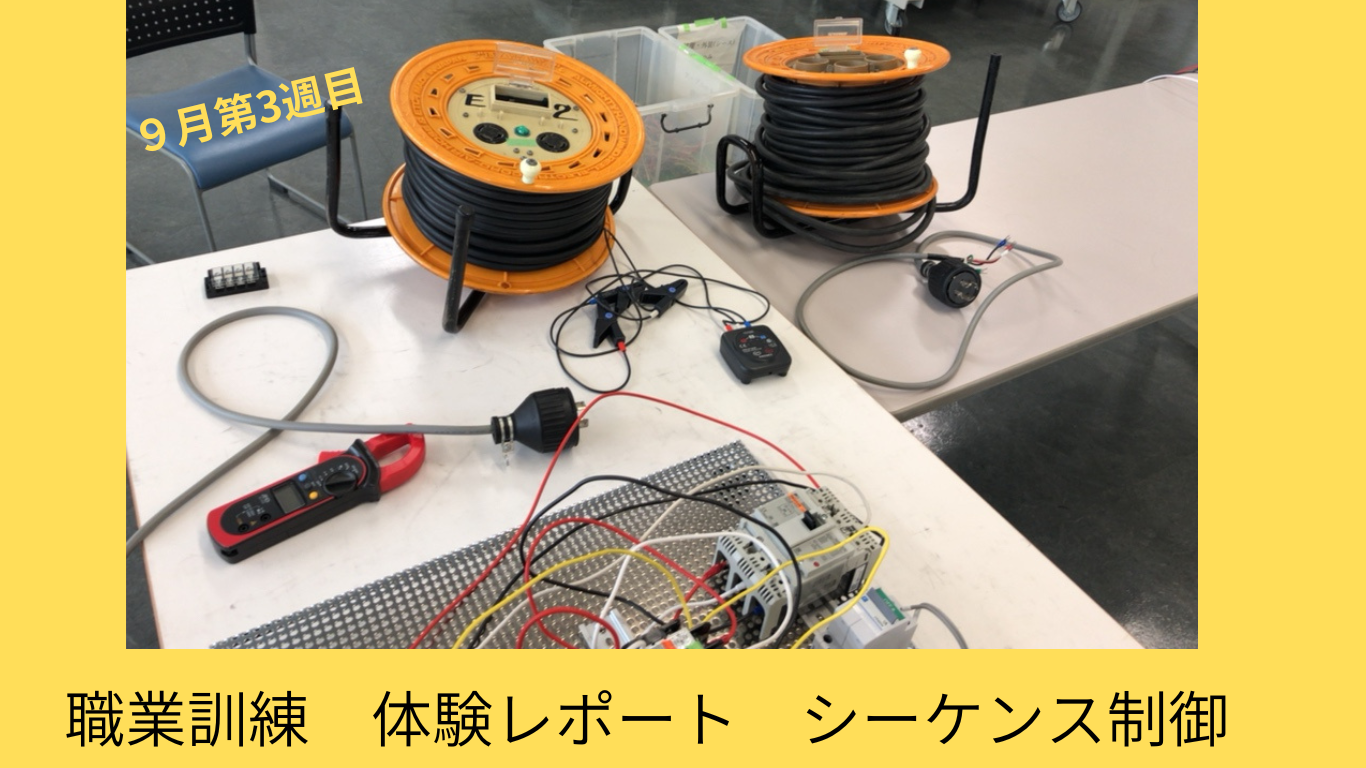
今週は「シーケンス制御」をテーマに座学と実習を行いました。シーケンス制御とは、複数のリレーや接点を組み合わせて作業の順序(シーケンス)を自動で実行させる制御方式です。今回の実習では三相回路を使ってモーターを正回転・低速回転・逆回転させる回路を組み、配線・動作確認を行いました。各機器の役割を理解し、ラダー図(回路図)で順序を設計することが狙いです。
1. 今週習ったこと(要点まとめ)
- シーケンス制御は基本的に複数のリレー(接点)を組み合わせて「順序」を作る。安全・相互ロック・自己保持などの考え方が重要。
- 三相回路の基礎(相と相の取り扱い、検相の必要性)を座学で学び、実習では三相モーターを実際に動かす回路を構築。
- 実習テーマ:
- 正回転(低速)をさせる回路
- 正回転から逆回転へ切り替える(手動・自動いずれかの切替)回路
- 各回路が設計どおりに機能するか、インターロック・サーマル保護・ランプ表示などを確認。
2. 今回使用した機器と役割(詳しく)
- マグネットコンタクタ(電磁接触器)
モーターの主電路を遠隔で開閉するためのスイッチ(電磁式)。正回転用(F-MC)と逆回転用(R-MC)を用意し、相順を切り替えることで回転方向を変える。補助接点は自己保持やインターロックに使用。 - サーマルリレー(THR)
モーターの過負荷(過電流)を検出して主回路を遮断する保護装置。定格電流に合わせて調整し、トリップしたら白ランプ(THRトリップ表示)を点灯させる。 - モーター(3相)
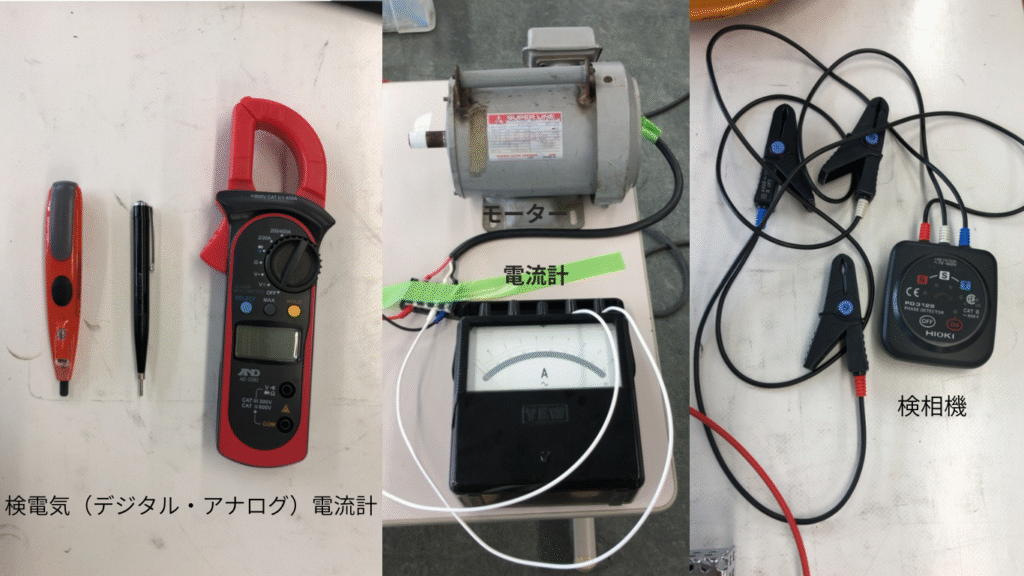
実際に負荷を駆動する機器。回転方向は接続する相の配列(検相)で決まる。低速運転はタップ切替やインバータが必要だが、今回は回路上で低速(交流の電圧やスター・デルタ切替とは別に簡易的に扱う)に触れた。 - 検電器
電源がライブかどうか(電圧の有無)を確認する工具。動作確認や配線作業前に必須。 - 電流計(A計)
モーターに流れる電流を測定し、負荷状態やサーマルリレーの設定が正常かをチェックする。 - 検相機(位相確認器)
三相の相順(R-S-Tなど)が正しいかを確認する機器。相順が逆だとモーター回転方向が逆になるため、必ず確認する。 - 回転計(タコメータ)
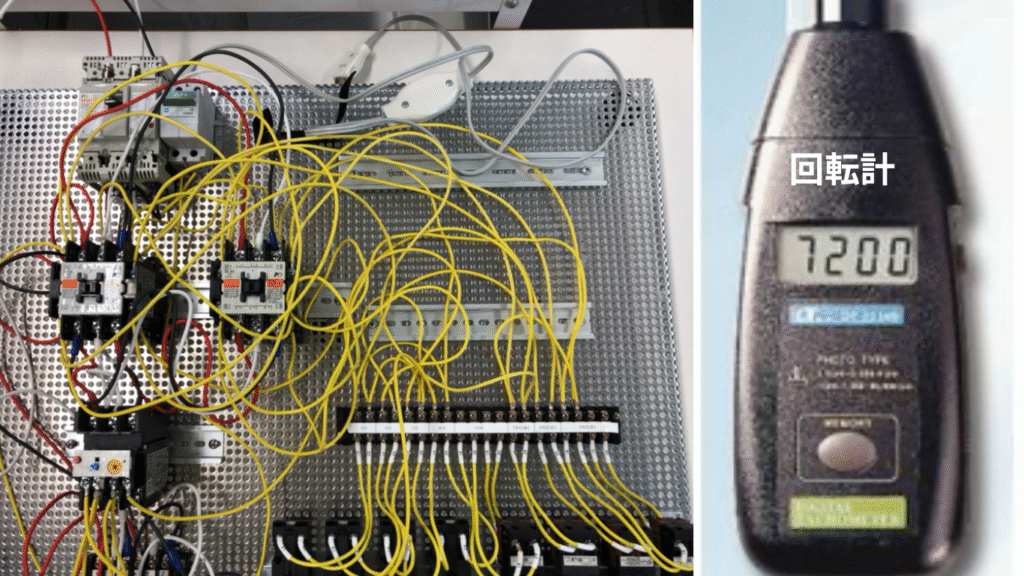
モーターの回転数(rpm)を測定して、低速/通常速度で期待どおり回っているかを確認する。
(※今回の回路では「30秒の待ち」を入れて自動的に切替えるためにタイマリレーを用いる設計が含まれることが多く、実習でもタイマを使ったパターンを扱いました。)
3. 実習課題:回路設計と配線・動作確認(仕様と実装イメージ)
課題仕様(与えられた条件)
- F-BS(前進ボタン)で正転、R-BS(後進ボタン)で逆転起動。
- F-MC と R-MC は互いにインターロック(同時投入禁止)。
- 正転中にR-BSを押すと安全に逆回転に切り替わる動作を実現(逆も同様)。
- ランプ表示:
- 緑(停止時点灯)
- 赤(正転中、点滅表示)→30秒経過後に逆転処理を始め、橙は逆回転中(点滅)
- 白(THRトリップ表示:過負荷時点灯)
4. 配線・動作確認のチェック手順(現場で必ずやること)
- 電源遮断:作業前は主電源を完全にOFF。検電器で無電状態を確認。
- 検相確認:検相機で相順が正しいか確認(相順誤りで逆回転になる)。
- サーマルリレー設定:モーターの定格電流に合わせてTHRを正しく設定。
- 補助接点の配線確認:自己保持回路・インターロックの配線ミスがないかチェック。
- ランプ/タイマ確認:点滅装置やタイマの設定(30秒)が意図どおりか。
- 無負荷試運転:初回は無負荷で動作確認。電流計で過大電流が流れていないか確認。
- 異常時の確認:THRがトリップしたら白ランプが点灯するか、主回路が切れるか確認。
5. 学び・振り返り(訓練としてのポイント)
- シーケンス制御では**順序と安全(インターロック)**の設計が全て。自己保持を組む際の補助接点配置ミスで「同時投入」など致命的不具合が起きる。
- 三相回路は相順の扱いが重要。検相器を使った事前確認は必須。
- 実際の現場ではフラッシャ・タイマ・PLCなど手段はいくつかあり、PCベース(PLC)に置き換えると設計・保守が楽になる点も学んだ。
- ラダー図を書いてから配線するクセをつけること。設計→検討→配線→試運転の流れが実践的で安全。

コメント